
浅谈直驱航模直升机和一架航模直升机的尾直驱改装小记
在我的博客直驱直升机(建议先读这篇文章)一文中,提及过一架全直驱的直升机的设计,相比于传统航模直升机较为复杂的传动结构,全直驱直升机的结构简单,维护性和可靠性都有明显提升。

随着技术的进步和航模技术的出圈,一方面是因为微处理器和电子技术的飞速提升和降价,一方面是因为植保,穿越机相对于传统航模市场大了数量级,多旋翼穿越机和植保机的电机相对于传统航模有极大的提升。而使用这些技术来改进传统航模直升机,不难得到双直驱的设计理念。
主旋翼直驱改造可能性的一个简易分析
植保机或者普通多旋翼使用的盘式无刷电机有较大的力矩,有能力直接驱动主旋翼,相比于主齿轮/皮带结构和传动损耗,自重并不高。

例如笔者的Devil 420 Fast,相当于亚拓的550,使用皮带传动,起飞重量1500-1600g,主旋翼直径约940mm,单主旋翼长度420mm。电机加传动轮的重量约为200g左右,KV1000,传动比6,经过传动系统的最大转速是3685RPM(6S 22.2V电池)最大瞬时功率1700W(大概是两匹马),最大连续功率1250W(大概是10个本文作者)。而T-Motor的Antigravity MN1005电机重量为255g,最大功率1500W,最大空转转速3996(12S 44.4V)最大拉力9323g,,二者的性能十分接近(虽然后者要求更高的电压)。后者不过略重一点。而电机的最大力矩可以表示为
$$\tau=\frac{\eta P}{2\pi n}$$
其中 $\eta$ 是电机效率,P为功率,n为每秒转速,当经过传动系统的直升机电机和盘式电机最大功率和最大转速接近时,可以认为二者有接近的力矩输出。也就是植保机电机足够带动直升机主旋翼。事实上,MN1005这款电机T-Motor官方给出的测试数据是32英寸(81.28mm)的大桨,最大推力达到9323g(瞬时功率1456W),可以在Devil 420上拉出6g的加速度。而一般来说,尾桨会使用10-20%的功率,航模直升机传动系统本身会损失大量的能量,又因为最大功率发热过多,动力系统(含尾桨)真正可用功率应是最大输入功率的60-70%以下,主旋翼应该在50-60%,也就是持续最大输出功率650-750W,瞬时最大功率900-1000W。作为对比,根据T-Motor官网给出的在32寸桨,8459g推力时,最大转速2882RPM,最大力矩为3.4NM,MN1005电机的最大输出功率达到了1025W,对应输入功率1456W,效率为70%。而使用30寸桨产生2096g推力时,效率达到了78%,如果用在devil 420 fast上,使用37寸桨,推力1500g,效率要更高些。
关于传动系统的能量损失和最后的输出功率,笔者曾做过一个简单测试,一架使用齿轮传动维护不良好的GAUI X3(不是是本文中改装的Devil 420 fast,要小很多)的悬停功率为150W左右,而相同油门摘掉主旋翼,尾桨零总距空转功率居然达到了50W(不排除电调定速异常,尾桨没有完全置中或者油门量不同造成的误差),考虑到如果尾桨总距为正,产生推力抵消主旋翼扭矩,至少还要耗费掉10-20W功率,其主旋翼使用的功率应在80W-90W,和博主在直驱直升机 气动理论估计,并根据电池容量核算的数据基本吻合。其悬停时主旋翼输入功率相对于输入功率为仅56%。
综合这些分析,MN1005的力矩和功率可以完全胜任420Fast的正常飞行甚至3D飞行,对于笔者这样的悬停+航线直升机飞手完全够用;而420Fast这样的直升机算电直中的中大号(油直就没有上线了),飞起来足够让路人与队友退避三舍。至于3D性能则对电调定速性能有很高的要求,需要单独测试单独分析。
这样改装的优点显而易见,减小了传动损失,极大的降低了维护难度,提高了可靠性。但缺点,仅就MN1005电机而言,12S的直升机定速电调会是一个问题。
阻挡笔者的改进主旋翼另一个原因就是MN1005 那高达1699的单价了。恐怕得过两年去闲鱼捡破产植保机公司的电机。

尾桨直驱
另一方面,穿越机使用的电机电调有极为优秀的响应速度,同时具备正反转能力,很适合驱动尾桨。而诸如大疆SNAIL,或者开源的BLHeli电调,都支持所谓的3D功能,也就是支持正反两个方向旋转。可以产生两个方向的推力。
所以在2018年再次捡起直升机开始,就有做直驱尾桨的念头。后来因为各种事务耽搁了。最近一二年,出现了一些很有意思的产品,比如朗宇的M2直升机,使用两个无刷电机直驱作为动力源,不仅做的小巧玲珑,而且稳定可靠。

在笔者高三无聊在家开始玩直升机起,就一直和直升机的尾桨作斗争,尤其是2011-2012年的国产(大陆)航模直升机还不算成熟,当时最拿的出手的飞越,虽然要大几千块钱,但尾桨毛病不断。轴传甚至很难真正的可靠工作。即使现在,绝大多数的飞机故障都出在尾传动或者操纵上。此次改造Devil 420 Fast尾桨的动力(本来打算先改Gaui X3,改装件都造好了。。)主要是因为安装不善,尾桨发生了射桨的事故,当时笔者正在调试直升机的角速度环控制,突然尾桨产生了巨大的噪音,主旋翼转速时常,一叶尾桨就从笔者身边呼啸而过,继而整机疯狂自转,还好悬停高度不高,落地并无损失。后来发现疑似是出厂时螺丝胶没有打足
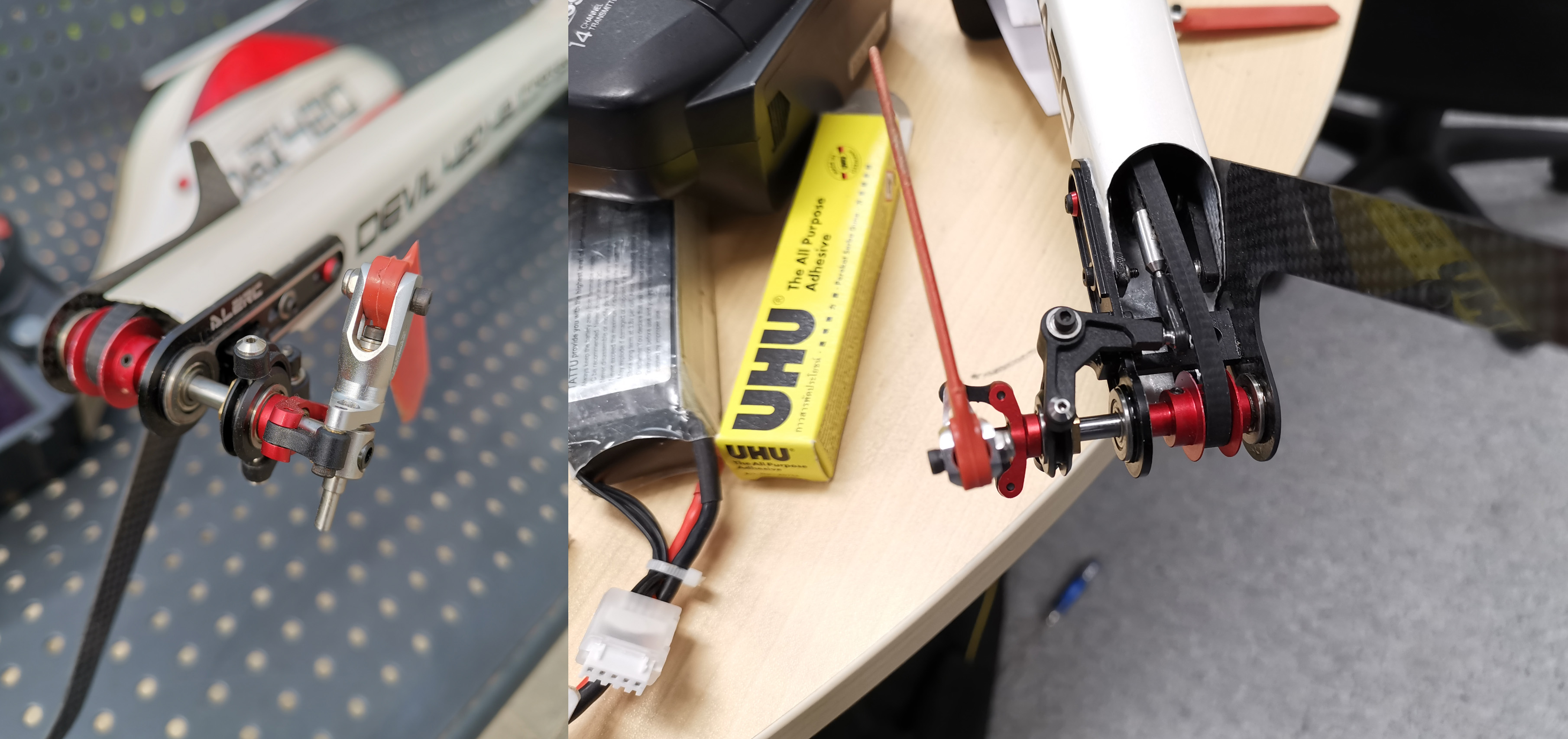
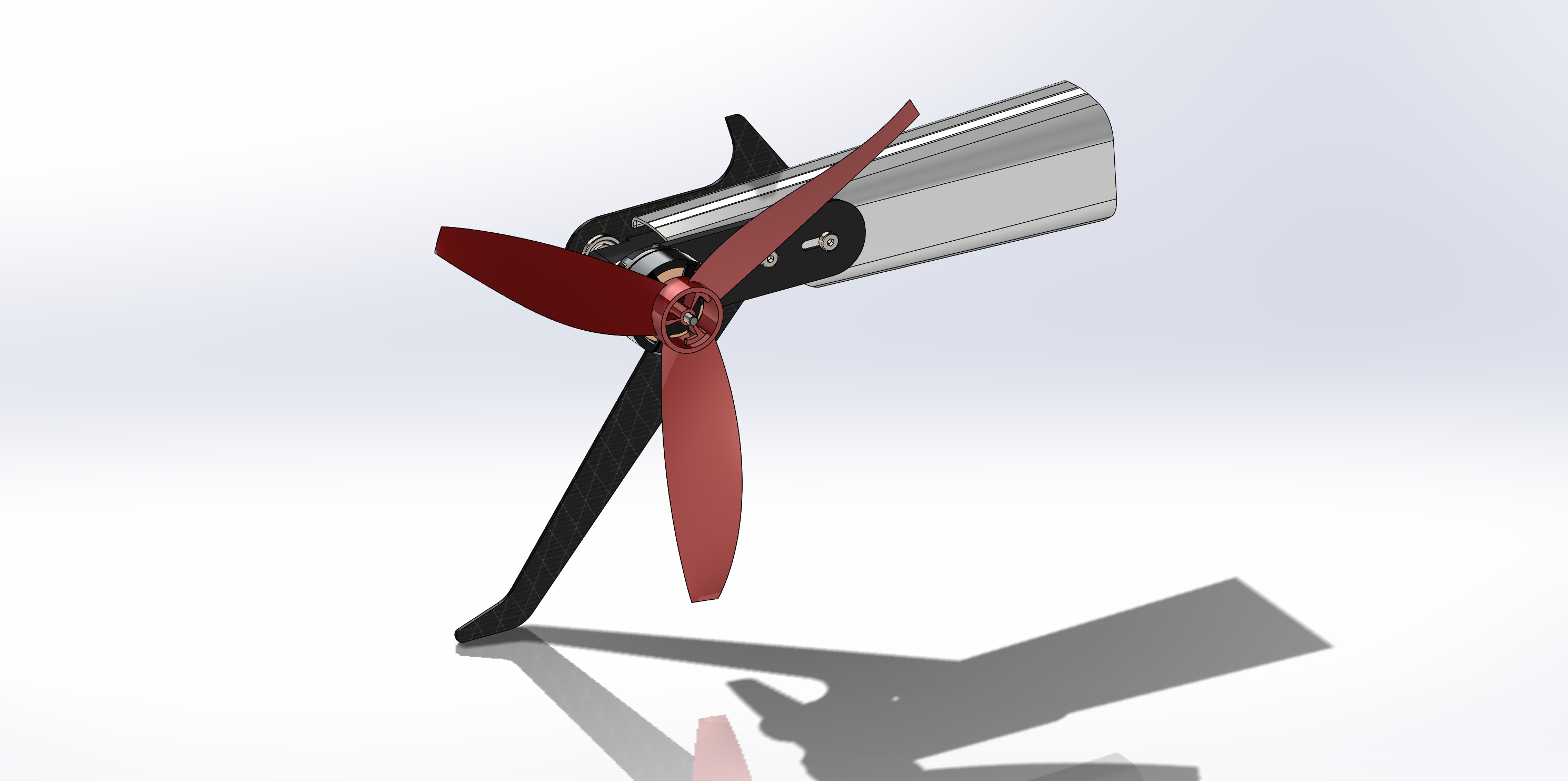
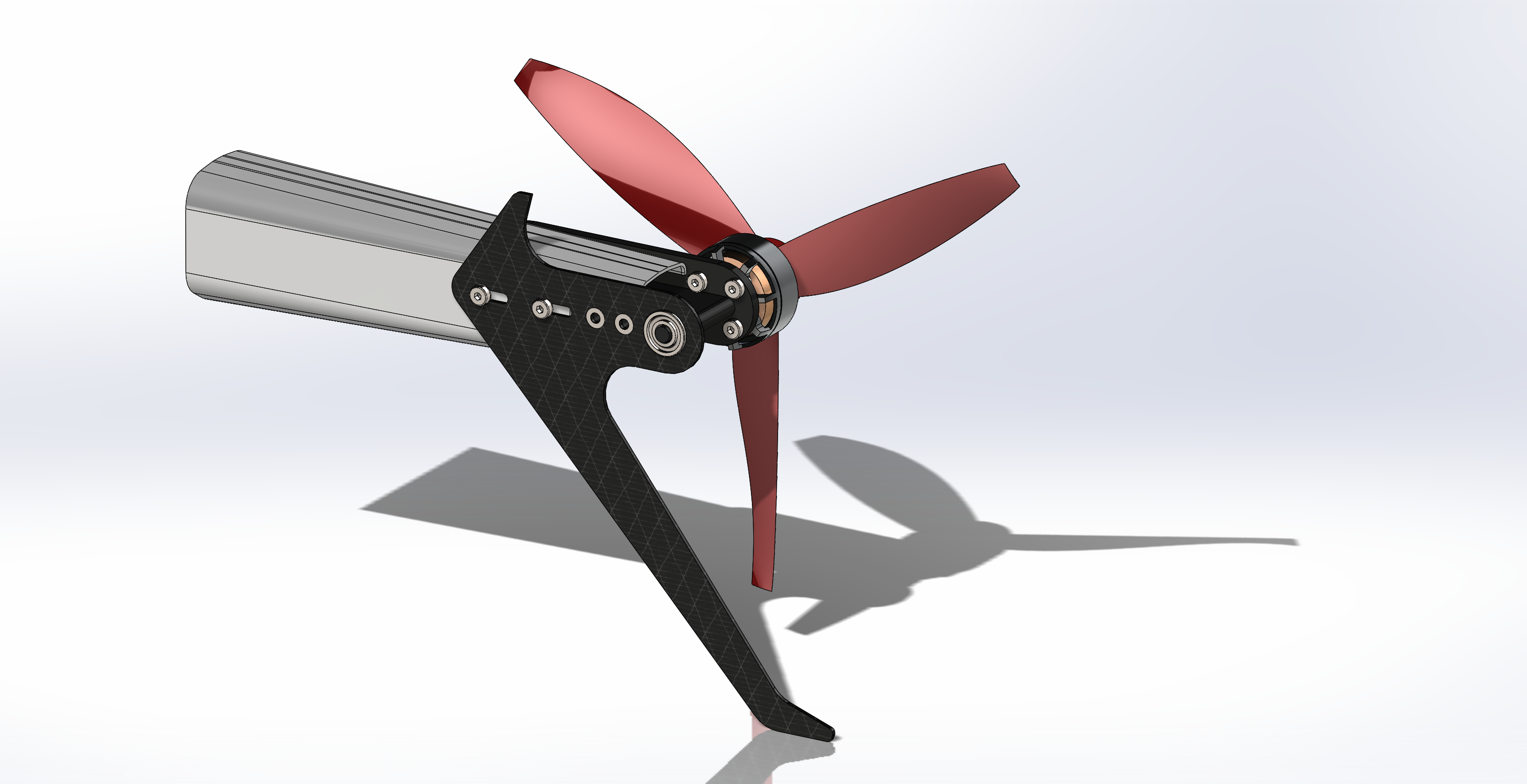
改造过程
改造过程不算复杂,首先使用SolidWorks(学校正版,水表勿查)逆向出尾部大致的外形,并且绘制电机安装座
然后3D打印安装座,安装一台dji snail穿越机电机,电机自重仅仅30g,原尾波箱+尾桨+垂直安定面尾62.5g,另外还有一个47.5g的DM1531T以及尾连杆和皮带。
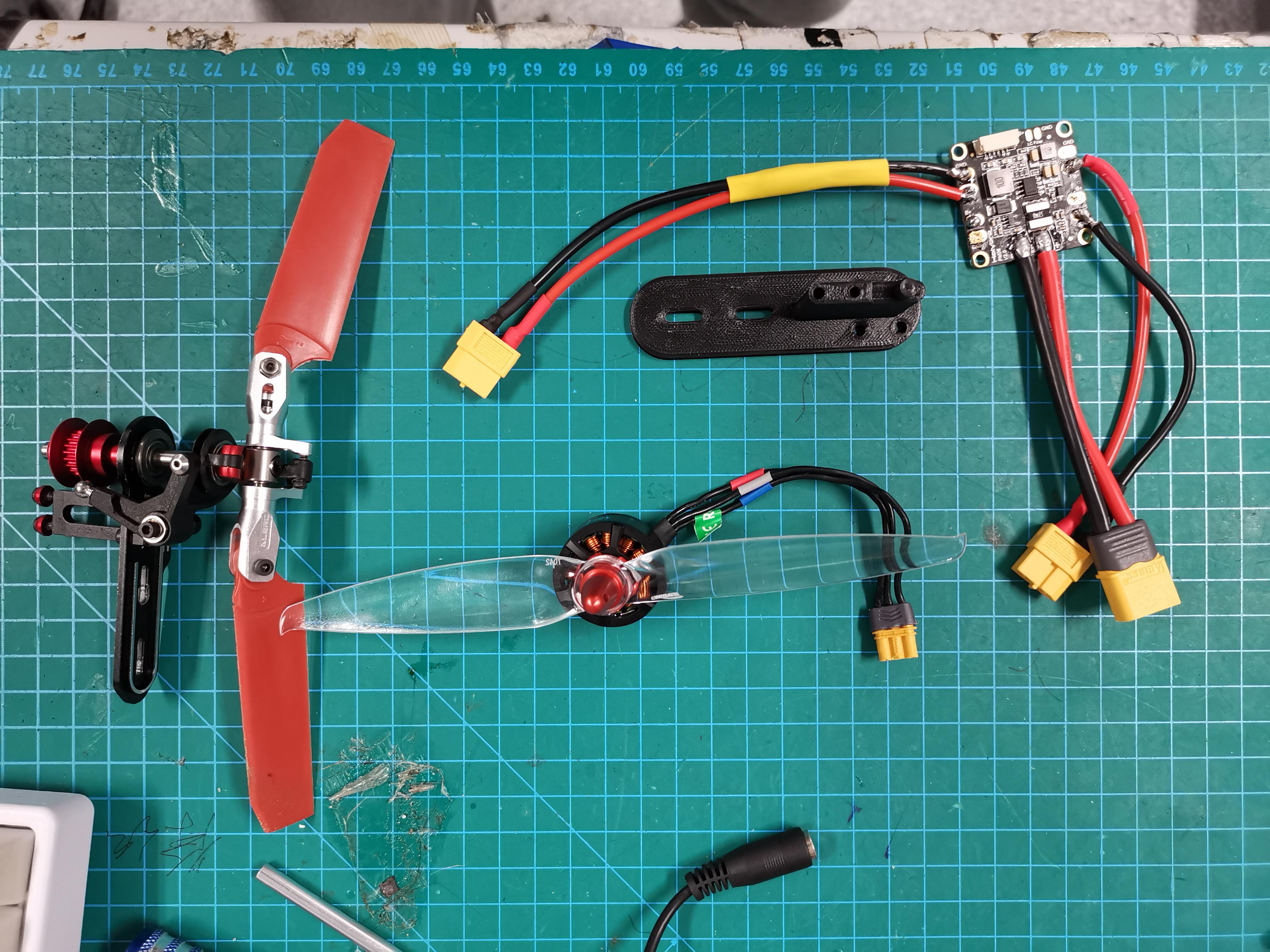
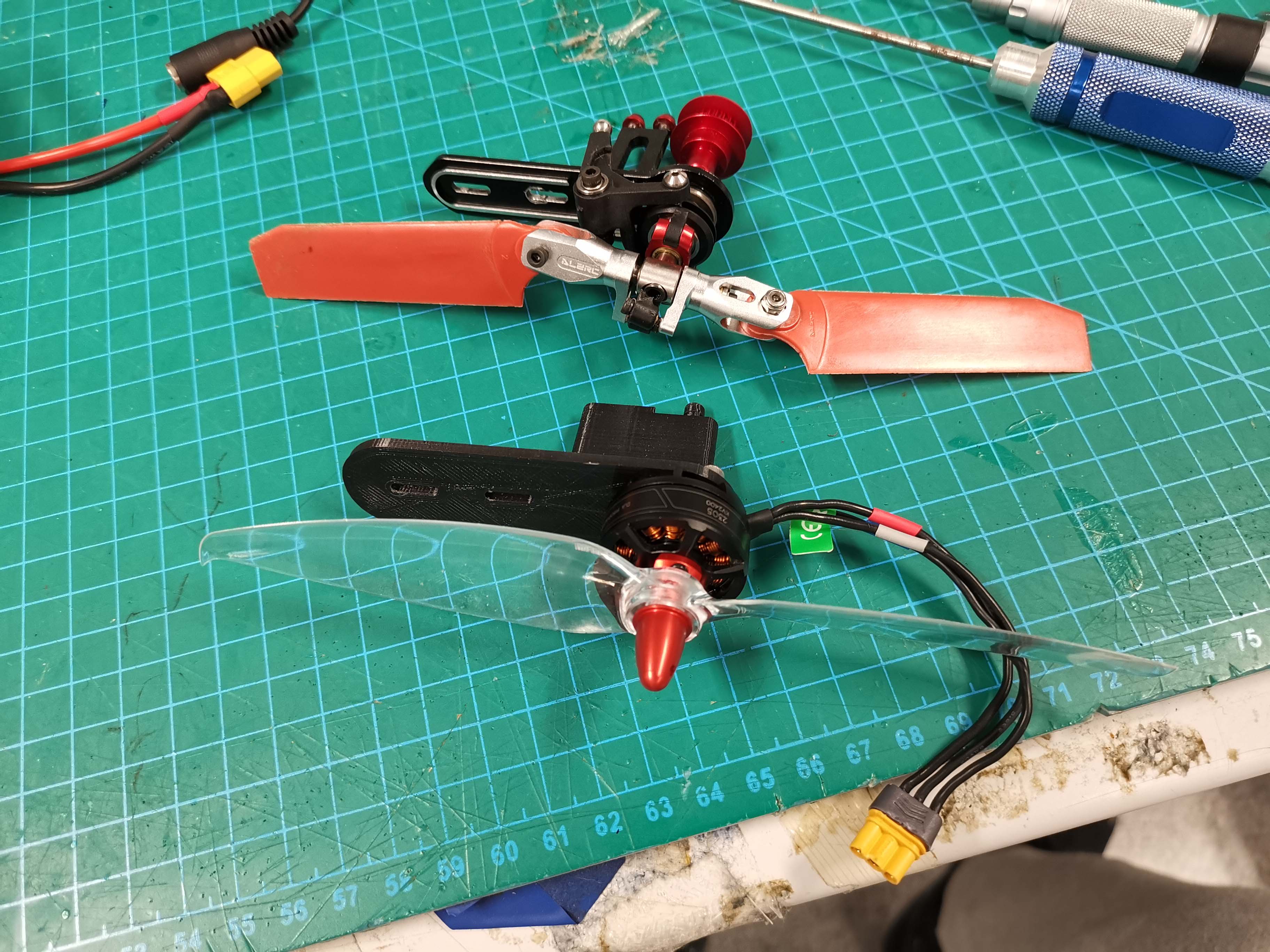
使用了一个BLHeli_S的35A电调被用来控制尾桨
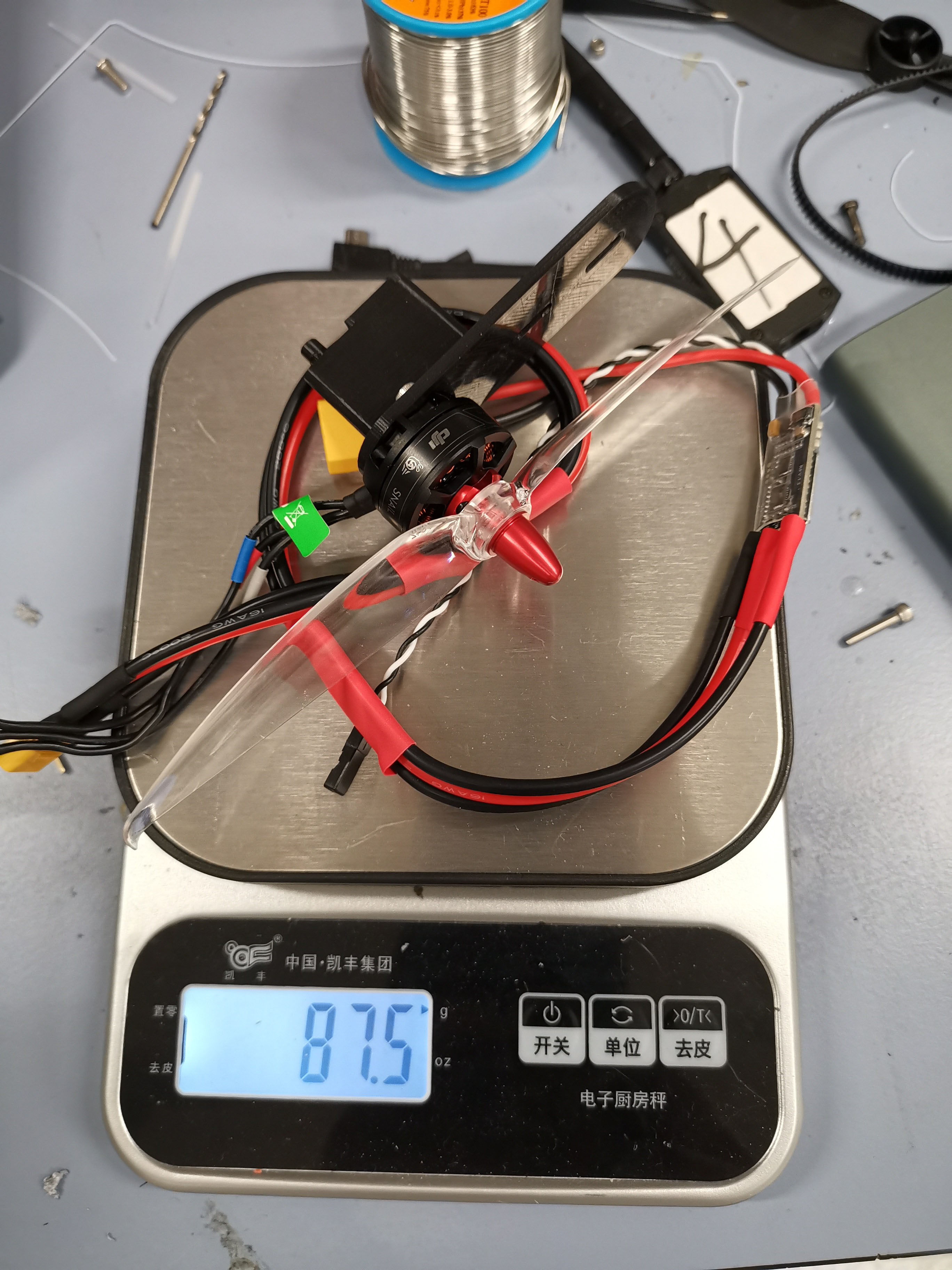
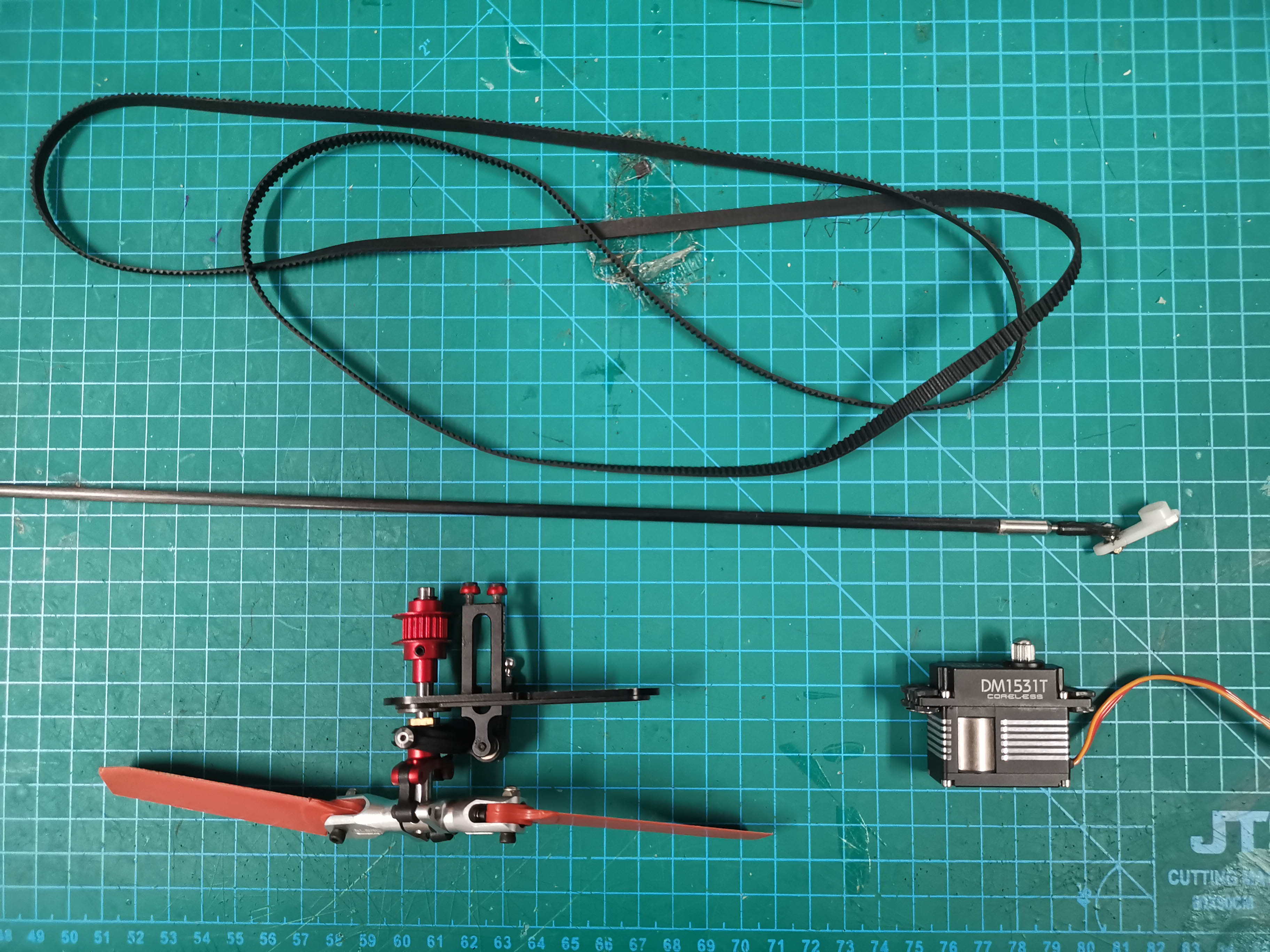
整套系统总重87.5g,比原来的轻,因为缺乏合适粗细的导线,线材占了至少其中30g。一个合理的重量应该在50-60g左右。如图是被换下来的原尾总成
几张安装效果照片



软件设置
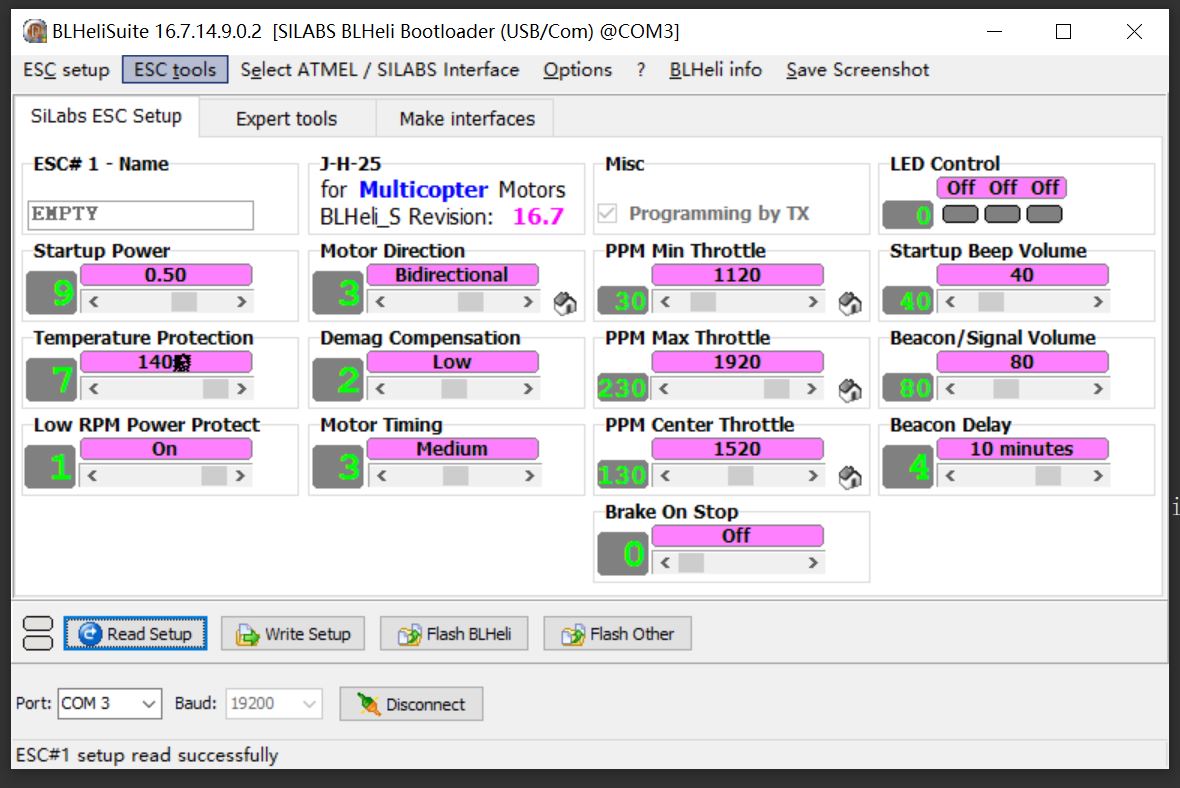
为了让尾桨能产生双向的推力,我首先设置了BLHeli的工作模式到Bidirectional,使用1520为中立点,1120到1920为工作范围
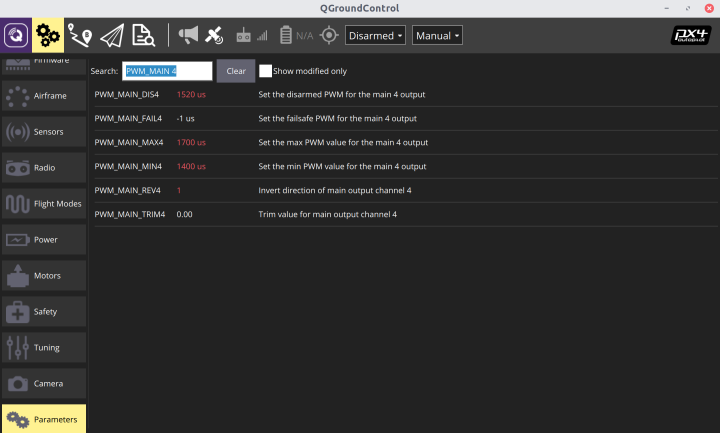
KBar等传统直升机陀螺仪没有解锁(arm)的概念,所以在地面尾桨一直有持续的小幅度波动输出,对于传统直升机,控制的是舵机,所以问题不大。对于我的改装来说,则会有转速产生,所以笔者选择了自己改版的PX4飞控 搭配Pixhawk使用。在disarm模式下,设置PWM输出尾1520。因为snail搭配7寸桨配6s电池推力极为过剩(在4s电池的情况下,使用一半油门就能达到650W功率,1300g的推力,在QGC里面配置4号舵机的范围尾1400-1700,中立点产生一点推力,并且适当加大了积分项的限幅,以包装在没有装主旋翼的测试情况下也能工作
在室内卸掉主旋翼解锁,使用手推拉,能感觉到明显的阻尼,使用遥控器有指令反馈。
在室外飞行测试中,分别测试了姿态飞行模式和角速度飞行模式,也就是航模直升机的NORMAL模式),在pid参数没有改变的情况下,尾旋翼表现很稳定,尾锁定很稳,对遥控器指令的反馈也非常迅速利落。
总结
这次周末下午的尾旋翼改直驱小工程十分成功:在悬停工况表现十分稳定,更大机动的表现仍需要进一步测试。直驱尾桨重量小,结构简单,由于没有传动损耗,理论耗费的功率更低(但是频繁加速减速也很费电),由于减少了操作连杆,舵机,尾皮带或尾轴传动,波箱,尾总距盘等结构,结构原比原设计可靠。同时也符合笔者对于技术进步的认知:机械结构会越来越简单,电子控制会越来越复杂。缺点是没法直接搭配以前的KBar等无副翼陀螺仪系统使用,而且在大顺时针旋转杆量时有可能需要尾桨变转向,这对无刷电机的性能仍然比较挑战。另外就是锁尾调参有一定难度,笔者现在还没有获得一个真正完美胜任各种机动的版本。同时也能引起我们一些思考,随着技术进步,以前航模上一些结构可以越来越简化,是否本来效率较高,但不适用大规模使用的直升机,共轴直升机等无人机设计也能普及开来呢?最后感叹一句,瘟疫真T*D提高人类的创造能力。。。。憋得不得不找事情做。
(BTW,我还没有搞定我的网站的视频上传,想看视频的请移步我的知乎https://zhuanlan.zhihu.com/p/133342926/)